ժҪ:ͨ�^���m�ϰ��b��ˮƽ�ܵ�������Y����ˮƽ���b���ٹܸ�������Ӌ���S���������Ĕ�ֵ���漰����о����һ�N����Ӌ�����w���W�������������OӋ�������������������ģ�Ͳ���GAMBIT������,ͨ�^FUNTܛ���M�з���,�����^������������ƽ�����Ӌ�㾫�ȡ���ֵ����Y���͌��Y�����^����������ƽ����`���9.5%�r,�����`���0.944%,�C���˷���Y���Ĝʴ_��,ͬ�r��������������Ϣ������������ģ�������M--���ă�����
1����
�������ٹ�ʽ��������Ӌ��һ�N���y�IJʽ����Ӌ,�����m�����ֹܵ�������Ҫ��,�����OӋ�о��ĸ�������Ӌ�����M�ҳ��͵�,��y��ԭ���c������Qֱ��������Ӌ��ͬ,������һ�N�����b��ˮƽ�ܵ�������Y���ĸ�������Ӌ��
����һ�㌦��������Ӌ�Ľ����о��Ǹ�����Ŭ�������M�е�,���ƌ���������Ӌ�����y����ʽ�r������ճ�ԑ����,��ԓ헵����Ì��H���Ǵ��ڵ�;���y����Ӌ���OӋҪͨ�^����z�������OӋ�D.��,�@�Ӳ��H���L���OӋ���ڶ����������OӋ�ɱ�������.�������cԭ��,���OӋˮƽʽ���b��������Ӌ�r���������˽⸡�������������Ĺ����C��,������Ӌ�����w���W,��CFD2]���g,�������������M�Д�ֵģ�M,ͨ�^�����漰���Y���M�з������u�r�����OӋ,���������������ĽY������,ʹ�������������OӋ���Ӿ��_,��������OӋЧ�ʡ�
2ˮƽ���b���ٹܸ�������Ӌ��ԭ��
2.1�z�yԭ��(�D1)
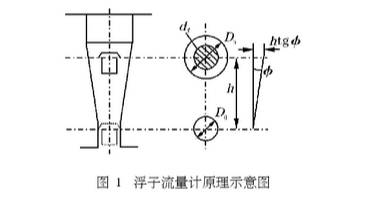
����ˮƽ���b���ٹܸ�������Ӌ�ęz�yԭ���c��[1]�y�Ľ��ٹܸ�������Ӌ��ͬ,���w�e������ʽ��

����ʽ��:Qv-�w�e����;��-����ϵ��;h--����λ��;��-�F�ι��F���;Vf-�����w�e;Qf-���Ӳ����ܶ�;Qһ���w�ܶ�;Af-���Ӵ�ֱ�������������e;D��һ�������ӭ�����ֱ��;Dh-����ƽ����h�߶ȕr�F�ιܵ�ֱ��;df-�������ֱ����
2.2ģ�ͽ��������OӋҪ��
������������Ӌ���y���OӋ�����ǽ�����ʽ(1)�Ļ��A֮.��,��ԓ����������ϵ������һ���ܺܶ�����Ӱ푵�׃�������ڱ������о���ˮƽʽ���b��������Ӌ,�y�����|��20���ˮ,�OӋҪ�������y������1~10m3/h,���̱Ȟ�10:1,�г�50mm,������ϵ��x�Ľ��ֵ��0.9~10������λ��41mm��̎�Ă��������S����ģ����D2��ʾ��
2��3Ӌ�㾫�ȵĿ���
�������ø��ӽM������ƽ�������Ӌ�㾫�ȡ���FLUNT��������������Е��ṩָ���������ܵ��ă���Fy����ճ��Ħ����Fm���Լ��@�ɂ����ĺ���Fr�����@��������ѭ����Ĺ�ʽ:
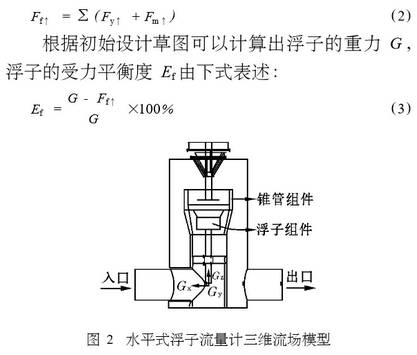
�@���O������������ƽ���|Ef|<10%�r���J�鸡�������_��ƽ��,�˕rֹͣӋ�㡣
3��ֵ����
3.1�W�ּ�߅���O��
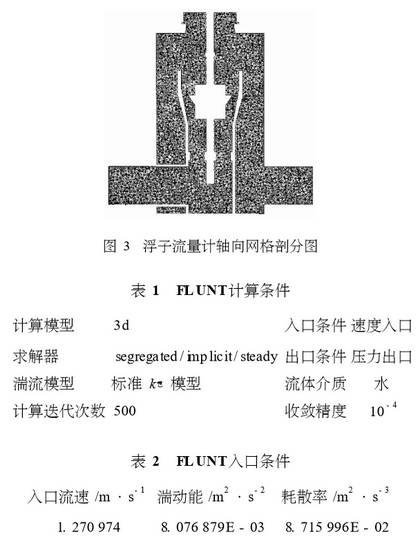
����ᘌ�������������ģ��,�x�������������w�W����M�оW�֡���D3��ʾ��ˮƽʽ��������Ӌ����λ��41mm�ߕr���S��W���ʷֈD��
�������M��߅����O���^�����O���ٶ���ڡ���������,�������U�����O����floatwalll,���ӱ����O����floatwall2,�����ӽM���͌���h��Ŀ��g�O����fluid��
3.2FLUNTӋ��l��
ģ�ͽ����Ժ�ݔ��.msh�ļ�,����FLUNT�M�з���,FLUNT������Ӌ��l�����1��ʾ��
�����������w���|�Č���:�ܶ�998.2kg/m2,ճ��0.001003kg/ms,�����ȟ�4182J/kg.K,�ጧ��0.6W/m.k.�ٶ���ڲ��õ���ƽ���ٶ�,ᘌ�����λ��41mm�ߵ�ģ��Ӌ���_��ƽ��r����ڗl��,���2��ʾ��
3.3�����^��
����ˮƽʽ��������Ӌ���S�����ķ����^����D4��ʾ��ԓ�^����Ҫ��ጵĎ��c������ʾ:
(1)��ÿ��ģ��������ٵĜʴ_ֵδ֪,�Ǹ�������������ʽӋ���һһ�����O������,��˷�����K�Y�����Д������鸡������ƽ��ij̶�,��ͨ�^�z�����Y��,�������M����������,���x����ƽ���c�`��С��10%�r,�J���_��Ӌ�㾫��,����Ӌ��Y�������`�����10%,���ȿ��]���Mԓģ�͵ľW��,��D4�е���ȷ���1;���W�ȸ��M��һ���̶Ⱥ��`���Դ���10%,��������ڗl��.(��Ҫָ�������,�����l��������Ӌ���{��),��D4�е��҂ȷ���2,ֱ���M��Ӌ�㾫�ȡ�
(2)����SMPLE�㷨Ӌ��r,ÿ��Ӌ������Δ���500��,������500��SMPLE�㷨���ѽ��_���Ք�����(10��)�r,�����ԄӽY��,�˕r�əz��Ӌ��Y��;�������Δ�����500����δ�Ք��r,ֹͣӋ��,�˕r�����z��W���r��߅���O��,�M�оW��ĺ����ʷֺ�߅��ĺ����O�������`�C��,�W���õ�ǡ���c���ֱ��Ӱ��Ք��ٶȺ��Ք��Y��,�������ľW���Ì�����Ӌ��lɢ���߽Y�������_��
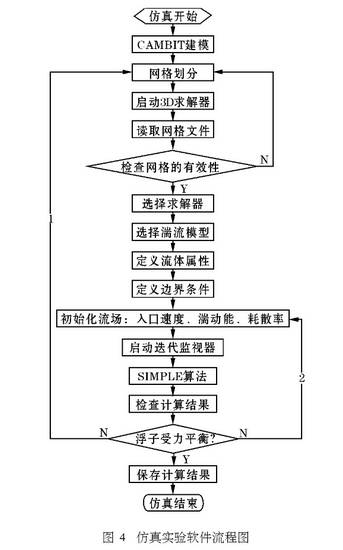
(3)����ǰ���ȴ��_�Oҕ��,�OҕX.Y��Z��������������Լ�k���̺�c���̵��Ք���r,���`�C��,��ʹδ�_���AӋ�ĵ����Δ�,���ڱOҕ�����ѳ��F���@�İlɢ�F��,�ɏ�����ֹ����Ӌ�㡣
4����Y�������Y������
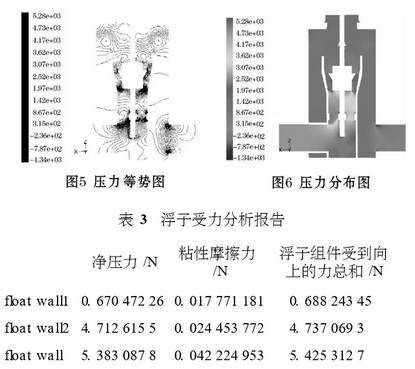
4.1����������(�D5.�D6)
�������^�����Ľ^��ֵ���Կ���:���ӵײ����҉��������Q,�@�N�����Q�F��Ĵ���ʹ���������^��r���ӕ����F���ӡ�
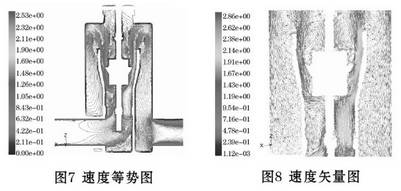
4.2�ٶȈ�����(�D7.�D8)
���D��������:
(1)���ɫ�ֱ���h϶��ͨ��e��С̎�����ο����F�ܱڵ������ٶ����,ǰ������ͨ��e�pС�����ٶ�����,���߄t�������������ĸ�׃�������,�e�Ǵ�̎���ܮa�����u,������Ч��ͨ��e�pС,���w���D��ܱ�,ʹ�ô�̎�ٶ�����
(2)��������,��ֱ�����½��ٶ��^С,��Ҫ��.��������ij�������߅,���ڳ��ډ���С,���w���Ӷ�څ����ڡ�
(3)���ӵ���С����̎,�����ٶȴ����^���׃����
4.3����������������
������FLUNT����������п��Եõ����3��ʾ����,�����OӋ���ӽo���ĸ��Ӳ��ϼ��ߴ�Y��,�ɵø���������5.995146N����������Y��,������Z�����ϵĺ�����5.4253127N����������ƽ����`�������ʽ�ɵã�1E,|=9.5%��С���O��ֵ10%,�J�鸡�������_��ƽ�⡣
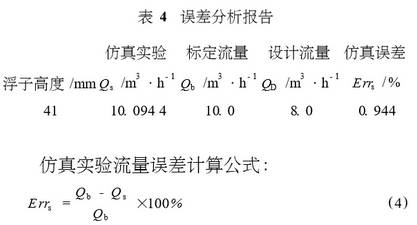
4.4���팍�Y������
���������Mһ����C��������������Y��,��Ҫ�M�����팍�����OӋ�D���ӹ��OӋģ��,�ӹ����,���������@ʾ�x��,�ژ˜��b�����M�И˶����˶��������ؘʱ���,�˜ʱ��x��u݆����Ӌ(����0.5��)���Y�Ϸ����������������팍���c����������������y����ʽ�õ����OӋ���������M�б��^���Եõ���4��
5�������������������Y���ă��������M�Y����ķ���
�������������������ķ�����֪���ӽM��������ƽ��,���팍�Ҳ�����ڴ����������F����Ӌ��ӵĬF��,�@�����ڂ������������F��׃�������������ٶȷֲ��D���Կ���,���ӽM������߅�ٶ��e��,��ԭ����ǰ���������,Ҳ�к�����������,���ڂ������ij�������߅,�������w������߅����څ�ݡ�����,���ڸ��ӽM��ǰֱ�ܶ��Ђ�ֱ�Ǐ�,���a��������,�����ӽM��������Ҳ�кܴ��Ӱ푡�����,Ҫ�p�����,��Q�ĸ����������Ǹ�׃�������Y������������������ʹ��������������M���pС��
���������������挦ˮƽʽ�����������ĽY��������c��������:
(1)����������,��������pС���u�Įa��,ͬ�r�{�����ٵķֲ���r��
(2)��ǰ������ֱ���B�ӸĞ鏝���B��,�p�����u�Įa��,혻����w������,ʹ�������б��^ƽ����ǰ������
(3)���Lǰֱ�ܶΡ��@���ἰ��ֱ�ܶ�ָ�F��ǰ�Ĵ�ֱֱ�ܶ�,�@Ҳ�Ǟ���ʹ���w��ͨ�^���������б��^�L�ľ��Ͷ�,ʹ�����ӽ���ְlչ�����ٷֲ���
���M�Y����ķ���Y����D9��10��ʾ,���D��������:
��1�����M�Y���������ĉ����ֲ��õ�����,��.�ӽM�������ӽ�ƽ��,����,����������������,������������ǰ������,�������^��ĉ��p��
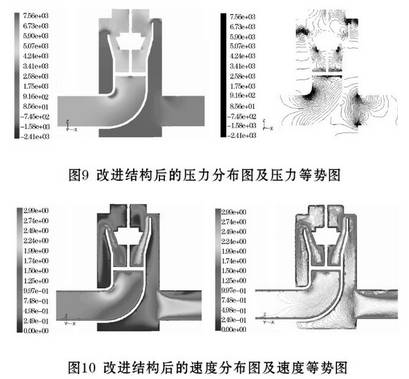
(2)���M�Y�����������ٶȷֲ����^����,�e��ʹ���ӽM���܇��]��̫����ٶȲ�,ͬ��������������ʹ��,Ҳʹ���ӽM����ǰ�������ӏ��s��ͨ�^���팍�Ҳ�C�����@�N��������������Ч�Ĝp�ٸ�������������,�������ӡ�
6�YՓ
��������������������֪,���ڸ�����41mm��̎���r�����S���������M�з���ɵõ��OӋҪ�����������ֵ����λ��̎��������ƽ����`���9.5%�����������팍�@�õ�ʾֵ�̶������cͨ�^������ֵģ�M�M���������挍�@�õķ�������ֵ�^��ӽ�,���������`���0.944%���������ø�������ƽ����`��_������Ӌ�㾫�ȫ@�����^�������Ч��,�������^�̟o���^�֏��{��������ƽ����`��ĜpС,���������`��ɵõ����˝M��ĽY����
������Փ�����͌���о�����,�@�N�OӋ�������H�����Mһ�����������w���ӵęC����������Ӌ�Ĝy��ԭ��,����ʹ�������������OӋ�M--���õ�����,ʹ�����y�����`���Ⱥ;��_�ȵõ����@����ߡ�����,�������Ĕ�ֵ�����c����о�Ҳ�Ƿ�������Q����Ӌ�������}��һ-�N��Ч������Ŀǰ�����@�N�����OӋ��ˮƽʽ���ٹܸ�������Ӌ�ѽ�Ͷ���Ј����F���������@�N����Ӌ���ܷ��������ȿɿ���
���σ���Դ�ھW�j�������֙�ϵ���h��!