ժҪ:��Bһ�N����HART�f�h�����ٹܸ�������Ӌ���OӋ���������ô���������y�����ٹܸ��ӵĽ�λ��,����HT2015��AD421���FHART�f�hͨ�������,��������MSP430��Ƭ�C��ܛ������,���F�˸�헹��ܺ�HARTͨ�š�
0����
�������ٹܸ�������Ӌ�����`���ȸߡ��y���������������pʧ�^С���ߜء��߉������g�����c,�V����������С���������Ĺ��IӋ����ԓ����Ӌ�������ʽ��λ�Ƃ������y���Cе�B�U�����D�Ƕ�ԭ���M���OӋ[1.2],���·�OӋ���s,�����^��,���Ȳ��ߡ�HART�f�h[3]ʹ��FSK���g����4~20mAģ�M��̖�ϯB���l����̖,ʹ��ģ�M��̖�c�����p��ͨ��ͬ�r�M�С��������һ�Nʹ�ø����Դ���ʽ������,����HT2015��AD421���FHART�f�h���������ܽ��ٹܸ�������Ӌ���OӋ������ԓ����Ӌ�܌��F���̷����O��С�����г��ȹ���,���й��ĵ͡�푑�������c,������M�ڵ�ͬ���HART�x��V�������ڹ��IӋ����
1ϵ�y�Y��ԭ��
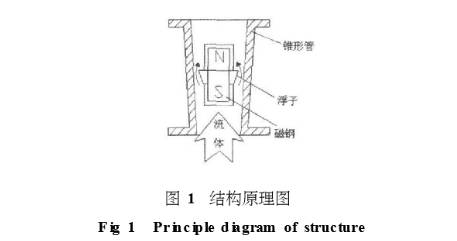
�������ٹܸ�������Ӌ�Y��ԭ��D��D1��ʾ��������һ���F�ιܺ�-һ�������F�ι��п������������Ƅӵĸ��Ә���,�F�ιܴ�ֱ���b,���������c�F�ܹ��S���غ�,��䓃�Ƕ�ڸ����С������w�������������F�ܕr,�����ڸ����ϵ�����3��:���w�����ڸ����ϵĄӉ��������������w�еĸ������ӵ����������@Щ��ƽ��r,���Ӿ�ƽ���ظ����F�܃�ij--λ���ϡ�����һ�_�o���ĸ�������Ӌ,�������F���е�λ���c���w�����F�������Ĵ�С��һ-*�����Pϵ�����������F���е�λ�ÛQ���ڸ��ӵĸ߶�,��ˣ�Ҫ���F�������Ĝy��ȡ�Q�ڌ����ӵĸ߶ȵĜy��[4]��
�������ڸ��������Ƅӕr,���Ƕ���Ҳ�S֮�����Ƅӣ��c����Ӌ�ⲿ����γɃ����䓴�·���,���әCе�B�U���Dһ���ǶȦ�,����̖���f�o�F���@ʾ��,ָʾ������С���ʌ�������С�Ĝy���D�Q�����λ�ƦȵĴ�С��
2Ӳ���OӋ
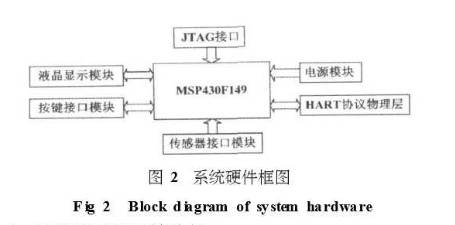
����ϵ�y��Ӳ���·��MSP430F149����ƺ��ģ���Ҫ���Դģ�K��HART�f�h�����ģ�K��Һ���@ʾ�ӿڼ����I�ӿ�ģ�K�Ȳ��ֽM��,��D2��ʾ��
2.1MSP430F149��Ƭ�C
����MSP430F149��Ƭ�C����16λ��RISC�Y��,�Ԏ�12λ��A/D�D�Q,CPU�е�16���Ĵ����ͳ����l����ʹMSP430F149���_�����a����Ч��,���`��ĕr�Դ����ʹ�����_����͵Ĺ�������[5.6]��ͬ�r��MSP430F149��FLASH�惦��ģ�K����2����Ϣ�δ惦��,�քe����Ϣ�惦��A��B,ÿ�θ���128�ֹ���
2.2������ģ�K
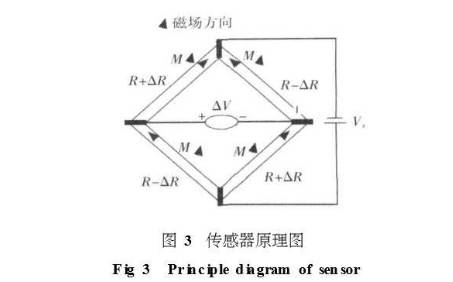
�������ú��F���ϵĸ�����ԭ���Мy�܇��ň���׃��,�\�����ˇ�Ƴɵı�Ĥ�����Ԫ������ԭ���:��4������Ԫ������һ������ʯ��Ļ�˹��늘�,��D3��ʾ��
2.3HART�f�h�����
��������HART�f�h����ӵ�Ҫ��,�OӋ�ˈD4��ʾ��������·�����У�HT2015������SMAR��˾�Ƴ��Č���HART�O���OӋ�ĵڶ��������{�ƽ��{��,ֻ���������Ԫ�����ɘ���������HART��̖���{�ƽ��{��HT2015�Ȳ�����5����Ҫģ�K:��ʎ��ģ�K������߉ģ�K���d���z�yģ�K���{���c�l�Ͳ�������ģ�K�����՞V�����c���{ģ�K��
����HT2015�����_ORXD��IIXD�քe��MSP430F149�Į���:����ͨ�ſڰl�ͺͽ��ն����B�ӡ������O��l������r������h�ϵ�HART��̖�͵�HT2015�Ľ��՞V�����M�ОV���ͽ��{�顰0��,��I��������̖,��Ƭ�C���յ���Ч��HARTͨ�Ŏ����M��������,Ȼ����������ͨ�Ŕ�����̖,��HT2015�{�ƺͲ������κ�ͨ�^�����Cz�ӵ�AD421��Cz�ˡ�O0D���d���z�yݔ��,��RXA�˙z�y����Ч��ݔ��r,00��׃��,�a���Д�,�Ɇ�Ƭ�C�Д��Ƿ��M����ՠ�B��NRTS�ǰl��Ո��ˣ���CPUҪ��������r��NRTS�ƽ׃��,�l�͔����M���{���c�l�Ͳ�������ģ�K��
����AD421������AD��˾�Ƴ���һ�N��Ƭ�����ܔ�ģ�D�Q������������h���,16λ������̖�Դ��з�ʽݔ��,4~20mA���ݔ��,�Ɍ��F�ͳɱ����h�����ܹ��I����,����HART�f�h��AD421�Ȳ�����늉��{�������ṩ+5,+33V��3Vݔ��늉���߀����+125,+25V�����Դ,���ɞ��������������·�x�á�AD421���C16λ�ķֱ��ʺ͆��{�ԣ���e�־����`���0001%,ʧ�{�`���01%�����`���02%��
���σ���Դ�ھW�j�������֙�ϵ���h��!