摘要:介绍采用霍尔传感器检测浮子位移、利用低功耗单片机作为核心处理器的金属管浮子流量计,着重介绍利用霍尔传感器对浮子位移进行检测的基本原理以及霍尔传感器输出信号处理系统的硬件、软件设计,分析这种智能金属管转子流量计的主要特点。
1引言
在工业生产和科研测量中,经常遇到小流量、低雷诺数的流量测量。浮子流量计由于具有灵敏度高,测量范围宽,压力损失较小且恒定,测量介质种类多,工作可靠,维护简便,对仪表前直管段要求不高等优点,已被广泛应用。
浮子流量计的浮子位移与流量之间存在明确对应的函数关系,测出浮子位移即可确定流量大小。金属管浮子流量计(以下简称流量计)可以连续测量封闭管道内液体、气体或蒸汽的流量,既能就地指示,又能远传信号,可实现流量测量值的远距离显示、记录、计.算、调节控制等功能,因此广泛应用于石油、化工、能源、冶金、医药、轻工、国防等部门]的流量检测及过程控制。由于流量计的浮子位移不能直接读出,所以将磁钢封入浮子内,由设在转换器内的磁耦合机构得到浮子位移,并由位移传感器将与流量对应的浮子位移转换成电信号,以实现远传输出。目前常用的位移传感器有两种:差功变压器式传感器和电容式角位移传感器。但是使用这两种位移传感器要获得与流量对应的位移信号,需要通过磁钢耦合以及相应的四连杆、凸轮等机械机构进行非线性修正和传动来实现,这就会造成转换器传动环节多、结构复杂、存在摩擦力、回差增大,从而降低流量计的测量精度。因此无法实现流量计的转换器全电子化、小塑化以及在此基础上的智能化。为此,推出采用霍尔传感器检测浮子位移、利用16位低功耗单片机作为核心处理器的智能流量计。
2系统构成原理
该流量计采用线性霍尔传感器检测浮子位移,配合单片机应用系统,完全去掉了磁钢耦合、非线性修正及传动等机械机构。其工作原理如图1所示。
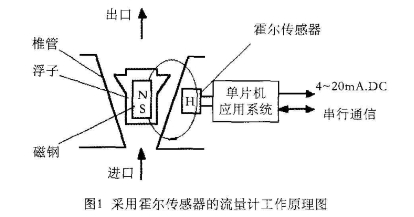
当被测流体自下而上流过锥管时,浮子产生位移,通过线性霍尔传感器的磁力线角度就会发生变化,从而使霍尔传感器输出相应电压。该输出电压输入到单片机应用系统进行处理后,可输出与流量对应的标准电流信号,也可通过标准通信接口进行数据远程交换。
在流量计的转换器中对应浮子位移范围中间位置处放置两个特性一致的霍尔传感器,两个霍尔传感器的磁敏感面互成90*。霍尔传感器的输出电压为:
E1=K1·I1·B1·sinθ
E2=K2·I2·B2·sin(90°-θ)
式中:
K1、K2为霍尔灵敏度系数;
I1、I2为霍尔元件的激励电流;
B1、B2为霍尔传感器所处位置的磁感应强度;
θ为磁力线相对于霍尔传感器的磁敏感面的倾斜角。
因为两个霍尔传感器选用特性一致的同--型号霍 尔传感器,采用同一激励电流,处于同一-高度位置,所以K1=K2,I1=l2,B1=B2。因此可得:
E1/E2=sinθ/sin(90°-θ)
=sinθ/cosθ=tgθ
θ=arctg(E1/E2)
可见,由E1、E2可求出磁力线的倾斜角。
由图1可见,随着浮子上升,通过霍尔传感器的磁力线的角度顺时针变化,因此求出倾斜角0就可以得出浮子的位移。
3单片机应用系统硬件设计
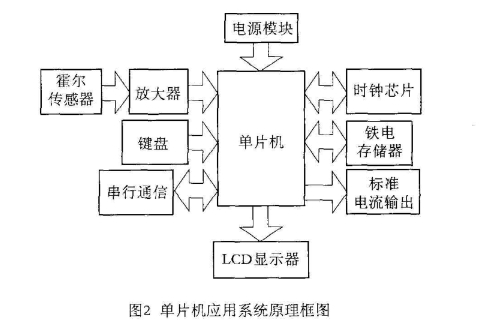
单片机应用系统的原理框图如图2所示。系统控制器为一片MSP430F149单片机。MSP430F149的主要特性与功能如下:
(1)超低电流消耗:具有CPUOFF和OSCOFF模式,可在电压降至1.8V情况下工作。
(2)基础时钟模块:包括1个数控振荡器(DCO)和2个晶体振荡器。
(3)系统内置模块:LCD驱动器、A/D转换器、I/O口、USART串口、看门狗、定时器、硬件乘法器、模拟比较器、EPROM等。
(4)16位RISC结构,125as指令周期,等待方式进行唤醒的时间为6Ixs.
(5)软件可在RAM中运行。程序可通过UART或测试引脚装入RAM,并能在实时条件下运行。可降低试验和调试的开销。
(6)仪3种指令格式,全部为正交结构,简化了程序的开发。ROM读取、RAM存取、数据处理、1/O及其他外围操作都使用公共指令,无特殊指令。
(7)系统工作稳定。上电复位后,首先由DCOCLK启动CPU,以保证程序从正确的位置开始执行,保证晶体振荡器有足够的起振及稳定时间。如果晶体振荡器在用作CPU时钟MCLK时发生故障,DCO会自动启动,以保证系统正常工作;如果程序跑飞,看门狗可将其复位。
(8)具有高级语言编程能力,已开发了C-编译器,支持JTAG仿真。
线性霍尔传感器将浮子位移转换成电压信号,经放大器放大后,由16位MCU进行运算处理和非线性修正后求得流量值,一方面送LCD显示器显示,另一方面送入DAC转换成模拟量,再经输出转换电路转换成标准电流信号输出。另外,还可通过串行通信接口RS485与上:位机进行数据交换。
4软件设计
软件的主流程图如图3所示。单片机在上电和复位的时候,先要执行初始化程序。然后,依次判断功能模块的标志位,当标志位有效时,执行该功能模块的程序,如标志位无效,则跳过向下执行。当程序执行到最后,再循环返回到初始化之后。
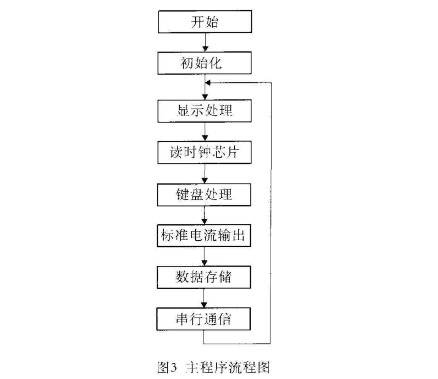
标准电流输出模块和RS485串行通信模块标志位是由扫描拨码开关部分所决定的;数据存储部分通过不断地读取时钟芯片DS1307来判断是否到了预先设定的存储时间,到存储时间后进入数据存储子程序。RS485通信实现了数据的远程传输,人们不必直接到现场去查看各种仪表的参数值,通过观看通讯界面即可获得当前和历史数据。
5结束语.
由于采用霍尔传感器进行位移检测,使流量计的转换器不需要任何可动的机械零件,实现了全电子化和小型化,大大降低了回差;采用16位单片机进行线性修正和运算,可使流量计的流量指示精度由2.0级提高到1.0级。
由以上分析可见,由于采用霍尔传感器和16位单片机,使流量计实现了小型化、数字化和智能化,提高了流量计的精度,增加了流量计的功能,并使得开发现场总线型的流量计成为可能。
本文来源于网络,如有侵权联系即删除!