ժҪ:Ϊ�˼�С����������������������������Ӱ��,���IJ����Ż����ӽṹ�ķ����������Բ����и��Ӵ�����,���ü���������ѧ(CFD)�ķ����Բ�����Խ��ʵĸ���������������������ֵ����,�ڷ�������Ļ����ϣ������������ڱ߽���������������������Լ�С��ԶԸ�������������������Ӱ��,�о�������������������С�������Ӱ��Ļ������𤸡�ӽṹ������;ͬʱ�����������������ЧӦʵ�ּ��ĸ�������������,�����������ʵ��Լ�𤸡�ӵļ��Ч����������֤,���м��Ч���ĸ���������������1-495mPa.s����Է�Χ��,�������������IJ������ɿ�����2.9%����.
1����
�������ø�������������������IJ���������,�������漰�����������IJ���,��ʵ�ʲ����������ʵ�����궨���ʵ��Ȳ�ͬʱ,��Ծͻ�Ӱ��������������ȷ�ʡ�����������,����������ѧ�����˴������о�,��Щ�о��ӷ����Ͻ��ɷ�Ϊ������,һ���о������ڶ����еĸ�������������ͨ��ʵ���ҳ��������������;��һ�������ھ������������Ӱ��ĸ��Ӵ������ṹ��ơ�
������������������������������Ӱ��ֻ���ڱ�����Ϊ�������������ȱ仯���ɵ������,���ܶ����Ӱ������ʾֵ�������������ڶԸ��Ӵ������ṹ�Ż�����:FisherK��������ڱ궨�к������Ӱ������[5],�˺�Miller.R.w����һϵ������ṹ�ĸ�����״��,ָ����Щ���Ӿ����Ȳ���������ֵ,�ڴ�����������ʱ,����Ҫ������У�����������ǵĹ����в�û��ָ������������������Բ����еĹ���ԭ������Ӧ���ȷ�Χ��
����������ͼ�ҵ��ܹ���С������ԶԲ���Ӱ��ĸ��������������ṹ,�������ܽ���Ļ���,Ϊ�Ż����ӽṹ�ṩ���ۻ����������ڹ�ҵ��ʹ�ò��������Һ�ĸ�����������������������ѹ�Ľ�����������������,������������ʾ��ʵ�鷽�����о��������������������Ȳ��۲쵽�����ڲ������ı仯,Ҳ�������з��ķ��á����ڴ�,���IJ���CFX�����Բ�����Խ��ʵĸ��������������ڲ�������������ֵģ��,ͨ���Է������ķ���,�����С��ԶԸ�������������Ӱ�췽��,���������Ƴ�����Ӱ��С�ļ�𤸡�ӡ�
2���������������Ļ����ṹ
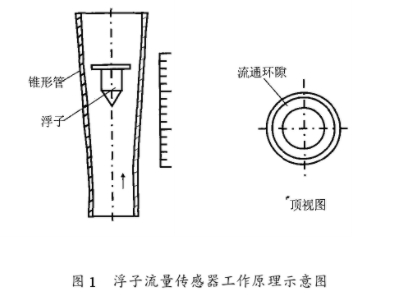
�����������������������ṹ��ͼ1��ʾ,�ڴ�ֱ���ι��з���һ��������Ҳ���Ǹ��ӡ����������¶�.��������ʱ�����ڸ��ӵ���������ʹ�����±����.����ѹ��,�Ӷ��Ը����γ�һ�����ϵ�������,��������������������,��Ӧ�ÿ��Ǹ��ӱ�������Ħ���������������ڸ��ӱ���������ʱ,���������˶�����ʱ�������ι�֮��Ļ�ͨ�������,���ټ�.��,���Ӷ������������ü�С���������ܵ������ﵽƽ��ʱ,���Ӿͻ�ͣ����ijһ�߶�
3����������ѧ������Ӧ��
�������ļ�����ʹ�õĿ��Ʒ���ΪRANS����,ѡ�ù����г��õ�Standardk-εģ����Ϊ�������������ģ�͡�Ϊ�˼��,�Բ���ѹ����������Ϊ��д������ʹ�õ�k-εģ��ͨ����ʽ��������Ʒ��̡���ֱ������ϵ��,�����������µ���ŵʱ��N-S����.�������Է�����������
��������:
��������UiΪƽ���ٶȣ�PΪƽ��ѹ��,ʋ��ʋt,�ֱ�Ϊ�������ϵ���������ϵ��,�Ը�Re������,�����ϵ������ʽ����:
��Ϊ�Ķ��ܲ������ƽ��Ӧ����������
����ͬʱΪ���ܹ���̬���渡�������������IJ���ԭ��,ʹ���ӿ��Ը��������仯�Զ������������е�λ��,���ĸ���ţ�ٵڶ�����,�õ����������ƶ��Ŀ��Ʒ���;

��������F.Ϊ���ӱ���ѹ����,FVΪ�������ܵ��������,GΪ�����ܵ���������m�Ǹ�������������,△tΪ�������ǰ���ʱ���,△u�������ǰ����ٶȲ�,�����а�����ٶ�ת��Ϊ���λ��������.���ӵ�������ֱ��������ĸ������ܵ��ĺ�������ƽ�⡣
4�����������������
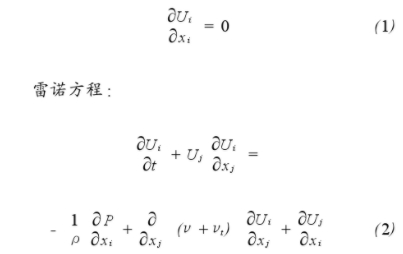
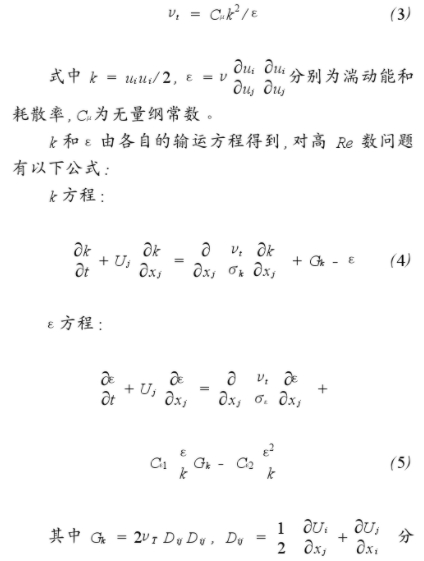
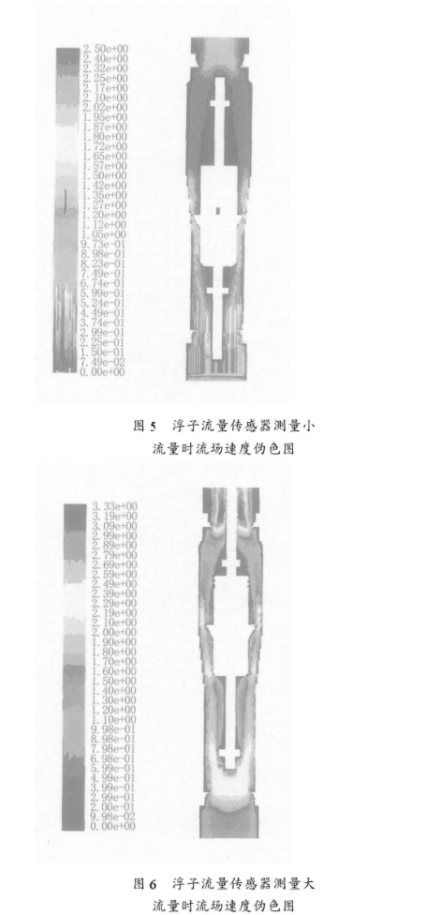
������������н����˸��������������ṹģ��,��ͼ2��ʾ��Ϊ����߸���������������ڷ���Ч��,���水��������ȈA���ٶ����湫ʽ������ͼ3��ʾ������������������ٶ�����,ͼ��ɫ������ɫ���仯��ůɫ����ʾ�����ٶ���С����,��αɫͼ�п��Կ����ӱ߱ڵ����ĵ��ٶ�����С��������Էֲ��ġ�Ϊ�����˵�����������������ķ������ͼ4��������������帡��������������������.���̼�ͼ��
����ͨ������,�ֱ�õ�С�����ʹ�����������������µĴ������ٶ�����αɫͼ,��ͼ5��ͼ6��ʾ��ͼ�п�����������������������ڸ�����Χ�Լ�����ڵ��ٶȷֲ�����������������,���ӵ�λ������,��������֮�价϶���,���������е��ٶȷֲ�Ҳ��֮�������Եı仯,�ݴ˿��Զ����жϳ��������ý���Ǻ����ġ�
����Ϊ���о��������Ħ�����Ը��ӱ���������Ӱ��,��������˸��ӱ����ܵ������������Ħ������ֵ��ͼ,��ͼ7��ʾ,ͼ�п�������Ŀ����ڸ���������֮ǰ�ĸ��ӱ�����dz��ɫ�����Ħ����ɫ����,��˵�����ӵ�ǰ���ܵ��˽ϴ�������������Ӱ��,����������ĸ��ӱ����ϳ���������ɫ�������ɫ��,��˵���˴����ӱ������ܵ������Ħ����Ϊ��ֵ,����������õķ���������������,����������һ���̶��ϼ�С���������������Ը��Ӵ�������Ӱ�졣ͨ���۲�������ͨ��������ʱ���ٶ�ʸ��ͼ,��ͼ8��ʾ,���Է���������������ɸ�������������ָ��������Ҫԭ��
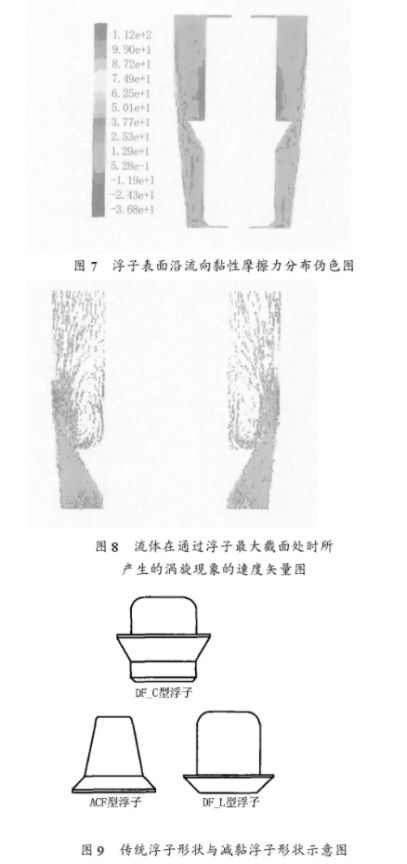
�������ݱ߽������,������Զ�ʹ����߽�����߽��,��������������������������ͻȻ���������롱�����������ķ����Ѹ���γ�һ��������,�������п��������������Ҳ����˵,��������������ܱ�֮��Ļ�϶ʱ,��϶�ٶ�����,�����ڽ����ھ��ȷֲ�,����������������ͻȻ�����ʱ�����ڷ����γ��˜����ڸ�������������������Ӷ��γ�����,ʹ��������������ܵ����Ħ���������������ϼ�С,�����븡�����������෴,�����Ͳ��ֵ�������Դ�����Ӱ�졣�������Ϸ���,���������������߽����ǰ���������������ʵ�ָ��Ӽ��ķ���,���а���:������֮ǰ�ĸ��ӱ����ԽС,����������������������ԽС;ӭ����ı�ԵԽ����,�����Խ��ǰ,������ɵ�����Ч��Խ����;�����������������еĸ��ӱ����Խ��,�����ܵ������Ħ����Խ��
�������ݷ����о��õ��ļ�����,������ԭ�л�������(DF_C��)��״�Ļ��������������־��м�����Եĸ���:ACF�ͺ�DFL����,��ͼ9��ʾ��
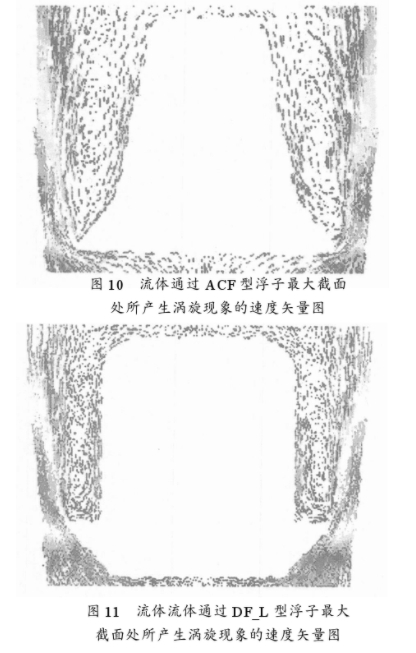
����ͼ10��ͼ11�������ּ�𤸡���ڷ��������е��ٶ�ʸ��ͼ,ͼ�п������������𤸡����������.ǿ�ҵ���������
�����������¸��ӽṹ��,ACF�����ر�����ı�Ե�Ϳ�ǰ�ķ����,���������������,�ڸ��Ӻ��־��ҵ�����,�ʷ�������������Ӧ��������;��DF_L��Ȼ��ACF����㿿��,����û��ACF�͵�ǿ��,���䴦���������ĸ��ӱ����Ҫ����ACF,(DF_LΪԲ��,��ACFΪԲ̨),�����������������ܵķ������Ħ����Ҳ�ϴ�
5ʵ����֤
����Ϊ�˼����𤸡�ӵļ��Ч����,��ʵ�������������״���������ɸ��������������ļ����,������״��ͼ9��ʾ��ʵ������ͨ��ˮ��Һ�궨�������������������ĸ�������߶��������Ĺ�ϵ,Ȼ��ʹ���ѱ궨�õĸ������������������ȵ��ڵ������Һ,������Ե�Ӱ��,�������������������������Һ����������ʵ������һ�����,���Խ��˵�����������������ܵ���Ӱ��Խ��,��֮��,˵�����������������м�С���Ӱ������ԡ�
����ʵ���в�ͬ���������ɵĸ��������������ֱ��5�ָ��ȼ���ά��ˮ��Һ�����˲���,���ڼ���ά�ص�ˮ��Һ�ܶ���ˮ�dz��ӽ�(������Ϊ1001kg/m³),�ʿ���Ϊ����������������������ά��ˮ��Һ������������ܶ�������������Һ�ȷֱ�Ϊ137mPa·s,495mPa·s,1215mPa·s,1692��mPa��
��1962mPa's��
������������ʵ��õ���ͬ�������������������������Һ�����IJ������,���1��
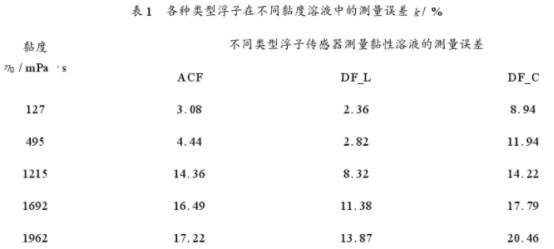
�����ӱ��п�֪,ACF������DF_L�����ڲ�����������Һ�в������ֱ�Ϊ17.22%��13.87%;ƽ���������ֱ�Ϊ11.12%��7.75%;Զ������ͨDF_C���ӵ����������20.46%��ƽ�����14.67%;�����������495mPa·s��Χ�������Һ��,���ָ��ӵIJ��������Կ�����5%����,����DF_L���ӣ���������ֻ��2.82%������ʵ��������֤�˷���������ý��۵���ȷ��,��ͨ����������ǿ�Ⱥ�������������������Ը��������������ļ�����á�
6��
����ͨ���о����Եõ����½���:
(1)����CFD����������Ч�ĶԲ����������ĸ�����������������ģ��;�ڶ������������Ļ������ж����о���,����������߽���������洦�������������������м��Ч����
(2)������������������С�������Ӱ��Ļ������𤸡�ӽṹ����,�����������ַ�ӳ���Ӽ�������ĸ���������������ͨ������ʵ����֤�˼�𤸡�Ӿ��м�������,��𤸡�Ӵ�������1-495mPa.s����Է�Χ�ڲ���ʱ���������������IJ������ɿ�����2.9%����
������Դ������,������Ȩ��ϵ��ɾ����