ժҪ:ͨ�^���u������Ӌ�ăx�������S�����ٵ�׃������������@��Ҏ�ɵ��^���c���Y,�������Wģ��,�������@�����Wģ��,�����ڲ�ͬ�����ٶΌ��x���������m�����a��,������ߜu������Ӌ��Ӌ�㾫�ȡ�ԓ����ͨ�^��Ƭ�C809C51���F��
1����
������������đ��ý���Լ������ĬF������,�҂��l�F�u������Ӌ�ăx�������c���w�����ٴ���һ�����Pϵ,����ͨ�^���Ҝu������Ӌ�x�������c���w���ٵ��Pϵ�������˃��ߵĔ��Wģ��,������Ӌ��r�����M���a��,�����Ӌ�㾫�ȡ�
1.1�u������Ӌ�Ĺ���ԭ��
�����u������Ӌ�ǻ��ڿ��T�u��ԭ���Ƴɵ�һ-�N��.�w��ʎ������Ӌ,�������ӵ����w�з���һ���������͵Č��Q�Π�����w(�u�������������зQ֮�����u�l���w),�͕����������ɂȮa��������Ҏ�ɵ����u,�����T�u�������u�l�����������w�ٶ�:

����ʽ��:Fһ���u�l��;dһ���u�l���w����;uһ���w�ٶ�;Stһ˹�ڹ�������
����St��ֵ�c���u�l���w����d�����Z��Re���P����Re<2x104�r,S,��׃��:��Re��2x104~7x106�ķ�����,Stֵ�����ϱ��ֲ�׃��
��ʽ����,��d��St�鶨ֵ�r,���u�a�����l��F�c���w��ƽ������u�����ȣ������@-�����Ƴ��˜u������Ӌ��
1.2�u������Ӌ�����c
(1)ݔ������̖���c���ٳ����ȵ��}�_��̖�����ڔ���̎����Ӌ��C�W��
(2)���̷�����,���ȸߡ�
(3)�o�ɄӲ������ɿ����^��,�Y�����Σ����ڰ��b�S�ޡ�
(4)�z�yԪ���c���y���|��ֱ�ӽ��|,�������w�Ļ��W���|Ӱ�,���÷������������L��
(5)���ɔ_������,�����M������Ӌ��,���������w�������|��Ӱ�,�o�x���Ę˶���ʹ�Î����˷��㡣
2�`��Įa�����a��
2.1�Ǿ����`��Įa��
�������ڜu�ւ��������y�IJ�����ƽ������,�������u�l���w�ɂȵ����١�����������B,��ͬ�����Z����,���ٷֲ�Ҏ���Dz�ͬ��,����ͬ�������¾��в�ͬ�����ٷֲ�,�M���f���˜u�������������z�y������Ҫ��ӳ���u�l���w�ɂȵ�����,�c�ܵ�ƽ�����ٵ��Pϵ����Ψһ�_���ġ��@�f���u�������������ķǾ����`������z�y�C�����Q���ġ��ڌ��Hʹ�Õr,���L���������ăx�������c���w���ٵ�ԇ�����,���˵õ���ͬ���ٶεČ��H�x�����������đ���MCS-51��Ƭ�Cϵ�е�89C51��ԇ��������ȹ̻�������Ӌ��EPROM��,�Ñ��Y�ϬF�����w������rͨ�^�I�Pݔ��ƽ���x������Kp��ֵ(Kp=(Kmax+Kmin)/2),���F�˜u�ւ������ķǾ���������
2.2�x�������c���w���ٵ��Pϵ���ֶ��a��
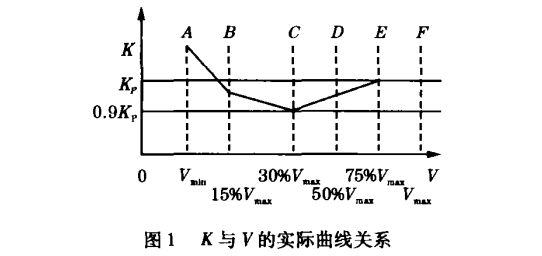
�����҂�֪���u������Ӌ�l���c����������,��Փ���v,�u������Ӌݔ���l���c���ٳ�����,Ҳ�����f�x�������㶨�����H��,��������Ӌ���������،�����֮�g����һ���̶ȵķǾ����`��b��,�҂�������һ�l�x�������c���ٵČ���Pϵ����,��D1��ʾ���D�и��c���˷քe��A(Vmin,1.0049Kp),B(15%Vmax,0.997Kp),C(30%Vmax0.992853Kp),D(50%Vmax,0.94883Kp),E(75%Vmax,Kp),F(Vmax,Kp)��
ᘌ��@�N�`��Ҏ��,�҂���ȡ�ֶ��a���ķ�ʽ�M���`���������ɈD1���Կ���,�S�����ٵĽ��ͣ�����ƫ�xƽ��ֵԽ��,�����҂����õķ��������_���ɂ�Ŀ��:
(1)�oՓƫ��ֵ���,ֻҪ����Ҏ�ɿ�ѭ,�Ϳ��a������,߀��������������Vmin�������������Ƅ�,���U������������̡�.
(2)��������Ҫ����턝�օ^�g�����`���ĵ����م^�g����ȡ��һЩ,���`��С�ĸ����م^�g���m�����^�g�Ō���
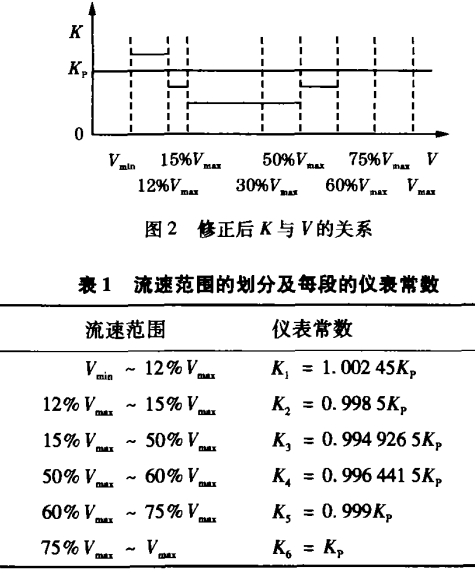
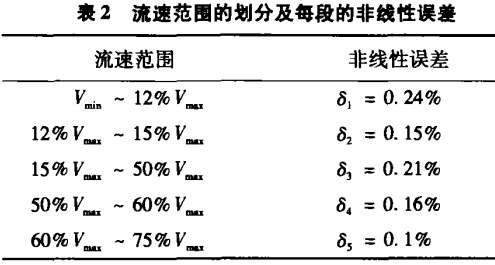
���˝M��������Ǿ����`����0.3%���µ�Ҫ���҂�������Փ����������Ҏ��,�քe��12%Vmax��60%Vmax̎���Ӄ��c(Ҋ�D2),���˷քe��G(12%Vmax,Kp),H(60%Vmax,0.998Kp)������:��Vmin/Vmax=8%~9%;��DE�����g�o���c���°�;��AB�����g�o���c���°����@�ӣ����������ٷ����ֳ�������,���1���@��̎����,�������Ǿ����`����0.3%���¡�
2.3�a����Ǿ����`��Ӌ�㼰��C
������2���a������x�������ķǾ����`��Ӌ��ֵ��
����������ij�S���a�ڏ���Dg80�Ĝu������Ӌ������C�a��Ч��(�aƷ��̖:04150)��
������3��ԭʼ�z�y������
����ƽ���x������:
Kp=(Kmax+Kmin)/2=2132.4305
�����Ǿ����`��:
δ=(Kmax-Kmin)/(Kmax+Kmin)x100%=0.62%
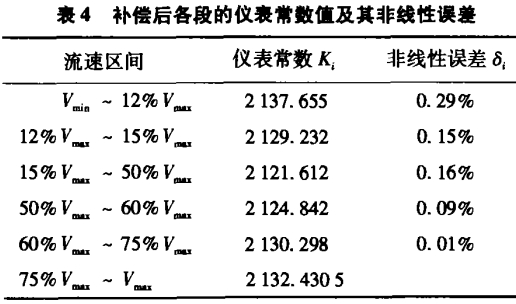
������4���a����ĸ��x�������Լ��Ǿ����`��Ӌ��ֵ���ɴ˿�Ҋ,�a���ȵõ�����ߡ�

2.4Ӌ������
����˲�r����Ӌ�㹫ʽ:

Q=qvt
����ʽ��:fi��Ki-----��i�l�ʶε����u���x�l�ʺ������ăx������;t---��Ӌ�r�g��
3ϵ�y�Č��F
3.1ϵ�y���Ԍ��F�Ĺ���
(1)��89C51�����Ԫ��,X25045�惦������
(2)����82C79��Ƭ�C������ͬ�r�@ʾ˲�r����(4λ)�Լ��۷e����(6λ+2λ�电),���@ʾ��λ���w�e������
(3)���е�늙z�y�����o����(HT7044�O�y늉�),��늺�����X25045�С�
(4)���п��T�����ܡ�
(5)�����I�Pݔ��,ݔ����ݰ���:�x��������˲�r�������ޡ�˲�r�������ȡ�
3.2��Ҫ����ģ�K
(1)������
(2)���r���Д���ճ���
(3)�I�P�Д�̎���ӳ���
(4)���̎���ӳ���
(5)25045�x/����B�Ĵ����ӳ���
(6)˲�r����Ӌ�����SSJS��
(7)�۷e����Ӌ�����LJJS��
(8)�����Єe�ӳ���CSDS��
4�Y���Z
�����Æ�Ƭ�C89C51��C���`���a���Ĕ��Wģ�ͣ������F�˸߾������ܜu�������e��x���OӋ��ͨ�^���x������������ʹϵ�y�ľ����кܴ����ߣ�����ʹ�u�������e��x�_��0.5���˜ʡ�����89C51��Ƭ�Cʹϵ�y�ķ����ԺͿ����Զ��õ������,82C79���õ��I�P�@ʾ�ӿ�оƬ,�����Ƭ�C����I�P���@ʾ�����S��ӿڲ�����X25045���Ԍ��������r�惦������ϵ�yܛӲ���OӋ����������,���й��̌��Ãrֵ��
���ā�Դ�ھW�j,�����֙�ϵ���h����